CONTROLADOR DE MOTORES
1. ¿QUÉ ES?:
El L298N es un controlador (driver) de motores, que permite encender y controlar dos motores de corriente continua desde Arduino, variando tanto la dirección como la velocidad de giro.
2. FUNCIONAMIENTO:
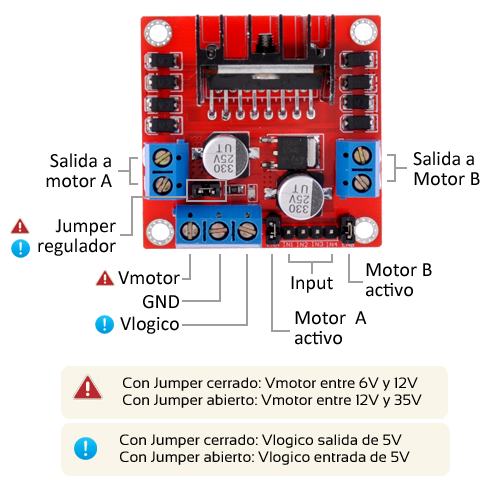
Básicamente un L298N consiste en dos puentes-H, uno para la salida A y otro para la salida B.Un puente-H es un componente ampliamente utilizado en electrónica para alimentar una carga de forma que podemos invertir el sentido de la corriente que le atraviesa.Internamente un puente-H es una formación de 4 transistores, conectados entre Vcc y GND, con la carga a alimentar entre ellos. Dibujado en esquema el conjunto tiene forma de “H”, de la que recibe su nombre su nombre.Conectando simultáneamente los transistores superiores o inferiores, podemos poner la carga Vcc o Gnd respectivamente, configuración que usaremos como freno.Por último, nunca debemos encender ambos transistores de un mismo ramal (izquierda o derecha), ya que estaremos provocando un cortocircuito entre Vcc y GND.La placa L298N incorpora electrónica que simplifica la conexión al puente H, agrupando las conexiones en 3 pines accesibles (por cada salida) y eliminando la posibilidad de generar un cortorcuito.Dos de estos pines, IN1 y IN2 (IN3 y IN4 para la salida B), controlan el encendido de los transistores de cada una de las dos ramas, encendiendo el ramal superior o inferior de la misma.El tercer pin (IEA/IEB) desactiva simultáneamente todos los transistores del puente-H, desconectando la carga por completo.
3. ESQUEMA DE MONTAJE: